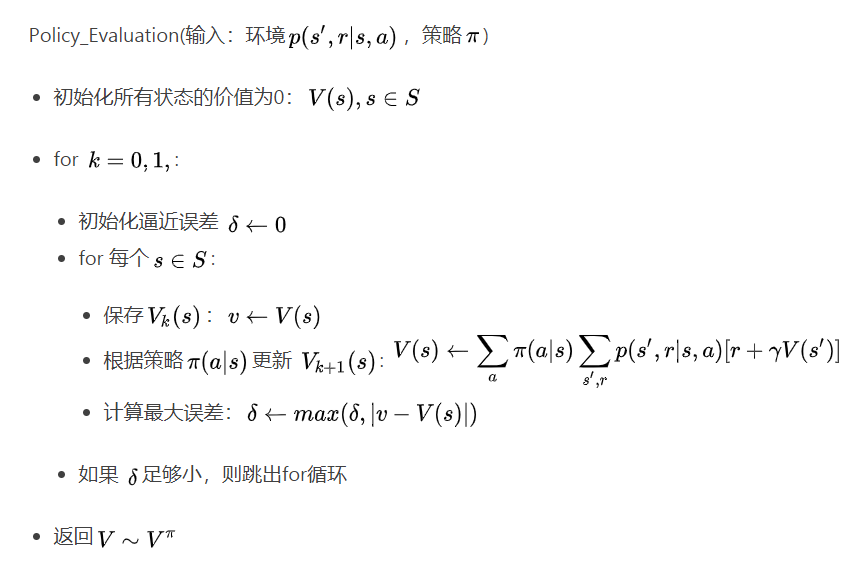
策略评估的伪代码如下:
| Policy_Evaluation(输入:环境$p(s’,r | s,a )$,策略$\pi$) |
- 初始化所有状态的价值为0:$V(s), s\in S$
- for $k = 0,1,\cdots $:
- 初始化逼近误差 $\delta \leftarrow 0$
- for 每个$s\in S$:
- 保存$V_{k}(s)$:$v\leftarrow V(s)$
-
根据策略$\pi(a s)$ 更新 $V_{k+1}(s)$: $V(s)\leftarrow \sum_\limits{a} \pi (a s) \sum_\limits{s’,r} p(s’,r s,a ) [r+\gamma V(s’)]$ -
计算最大误差:$\delta \leftarrow max(\delta, v- V(s) )$
- 如果 $\delta$足够小,则跳出for循环
- 返回$V\sim V^{\pi}$

下面的函数value_by_bellman_equation根据贝尔曼方程通过迭代更新状态价值进行策略的评估,其中参数env、policy、gamma分别表示环境对象、策略和折扣因子。
#用贝尔曼方程求策略policy的价值函数
def value_by_bellman_equation(env,policy,gamma = 1.0):
''' 求解贝尔曼(期望)方程
'''
# 初始价值函数
value = np.zeros(env.nS)
while True:
new_value = np.zeros(value.shape)
# 遍历所有状态
for s in range(0, env.nS):
# 遍历所有动作
for a in range(0, env.nA):
# 对每个动作,遍历可能的转移状态和奖励
Gt = 0.
for t in env.P[s][a]:
prob,s_,reward,dead = t
Gt += prob*(reward + gamma * value[s_])
# 贝尔曼期望方程
new_value[s] += policy[s][a] * Gt
# 迭代终止条件: 误差小于1e-4
if np.sum(np.abs(value - new_value)) < 1e-8:
break
value = new_value
return value
策略可以是任何策略,如下面函数定义了一个等概率策略:
#生成等概率动作的策略的函数对象
def make_equal_policy(nA):
action_probs={}
prob = 1./nA
for s in range(0, env.nS):
action_probs[s] = [prob for a in range(nA)] # {a : prob for a in range(nA)}
return action_probs
辅助函数print_value用于打印状态价值:
def print_value(value,shape=[3,4]):
grid = np.arange(len(value)).reshape(shape)
it = np.nditer(grid, flags=['multi_index'])
while not it.finished:
s = it.iterindex
y, x = it.multi_index
v = value[s]
if v >= 0:
print(" %.4f|" % v, end="")
else:
print("%.4f|" % v, end="") # -ve sign takes up an extra space
if x == shape[1] - 1:
print("")
it.iternext()
下面代码先用make_equal_policy定义了一个策略对象policy,然后调用策略函数函数value_by_bellman_equation评估该策略,最后用print_value函数输出这个策略对应的所有状态的价值:
policy = make_equal_policy(env.nA)
value = value_by_bellman_equation(env,policy)
print_value(value)
输出:
0.0035| 0.0910| 0.2012| 0.0000|
-0.0840| 0.0000|-0.4184| 0.0000|
-0.1925|-0.3011|-0.4848|-0.7424|
-
Previous
移民 -
Next
Configuring C++17 supported compiler on wnidows for CodeBlocks and Visual Studio Code
赏
 支付宝打赏
支付宝打赏
 微信打赏
微信打赏
支付宝打赏
微信打赏
您的打赏是对我最大的鼓励!